

Morphing Control Surfaces
The objective of this research is to develop a novel morphing control surfaces using pressurized flexible matrix composite (FMC) actuators. FMC actuators are high mechanical advantage actuators that take advantage of stiff reinforcing fibers to convert internal pressure to a mechanical force. The performance of the actuator (pressure, stroke, load, efficiency, etc.) can be tuned per application by the proper selection of FMC parameters, such as the matrix and fiber materials, number of fiber layers, and fiber orientation. Depending upon the orientation of the fibers, the actuator will either extend or contract axially during pressurization. By integrating into material systems, morphing structures can be developed with mult-directional actuation properties. For example, shown below is an illustration of an adaptive spoiler concept based upon FMC actuators. The integrated FMC actuators provide position control of the spoiler through coupled bending and axial forces applied to the spoiler. This results in precision control of the gap between the spoiler and the flap.
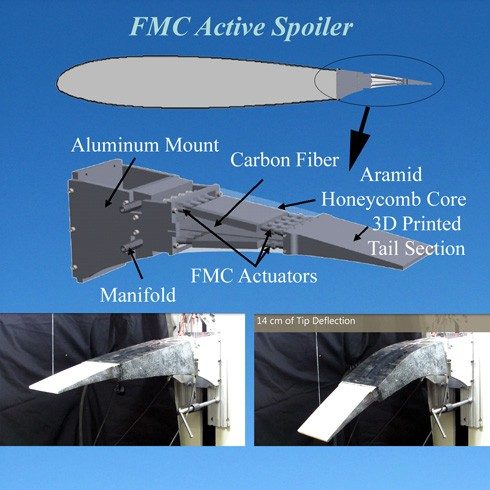
A FMC active spoiler was developed using a custom manifold, FMC actuators, perforated carbon fiber plate, and aramid honeycomb core. An array of extending actuators are located on top and contracting actuators are located on the bottom. An aramid honeycomb core provides provides transverse stiffness to handle the aerodynamic loads while minimizing the forces for expanding and contracting. The active spoiler is able to achieve more than 14 cm of tip displacement and is stiff enough to handle the aerodynamic loads.



Some example publications:
- Doepke, E., West, R., Philen, M., “Design and optimization of a morphing aileron control surface using FMC actuators,” Proceedings of SPIE - The International Society for Optical Engineering: Smart Structures/NDE, March 9-13, San Diego, CA, 2014.
- Kim, D., Capps, R., Philen, M., "Morphing Trailing Edge Control using Flexible Matrix Composite Actuators," 20th AIAA/ASME/AHS Adaptive Structures Conference, Honolulu, Hawaii, April 23-26, 2012.
- Capps, R., Hockersmith, B., Llames, G., Kamal, R., Philen, M., "Morphing Concept for Control Surfaces using Flexible Matrix Composite Actuators," AIAA Region I-MA Student Conference, Penn State University, April 13-14, 2012.
- Hinshaw, T., "Analysis and Design of a Morphing Wing Tip using Multicellular Flexible Matrix Composite Adaptive Skins," M.S. Thesis, Virginia Tech, 2009.