

Research
Research Focus
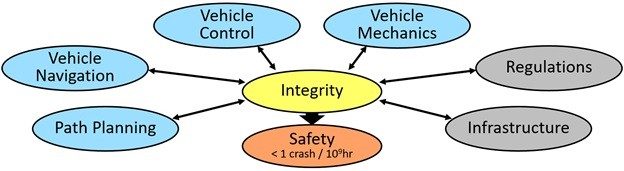
Our lab focuses on methods to quantify the accuracy, integrity, continuity and availability of multi-sensor systems, for example, in automated vehicle applications. In safety-critical applications, integrity, which is a measure of trust in sensor information, is of primary concern.
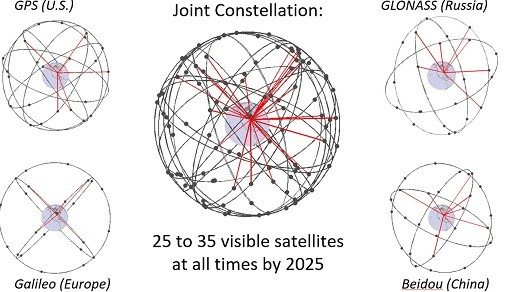
A new era in Global Navigation Satellite Systems (GNSS)
We are entering a new era in GNSS, with the modernization of the U.S. GPS, the re-deployment of Russia's GLONASS and the emergence of Europe's Galileo and China's Beidou. How do we best use these systems to ensure the safety of aircraft navigation applications?
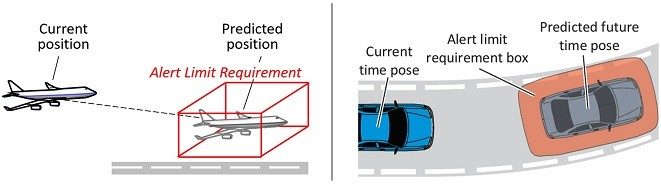
From "How safe is my auto-pilot?" to "How safe is my auto-driver?"
Can we leverage prior work in aviation safety to improve Highly Automated Vehicles (HAV)?
We develop analytical methods to evaluate integrity. This provides the means to:
- quantify safety of existing multi-sensor systems under a variety of operating environment, thereby reducing the need for experimental testing
- allocate safety requirements to individual system components to achieve an overall target level of safety, thereby enabling design for safety
- perform risk prediction, which is a key operational feature to enable hazard avoidance maneuvers
UAS-based GNSS jammer localization
This research aims at developing and implementing new methods to localize sources of radio-frequency interference (RFI) impacting Global Navigation Satellite System (GNSS), such as personal privacy devices (PPDs). PPDs are illegal but are used by motorists who do not want to be tracked by employers or authorities. PPDs have caused disruptions at commercial ports and airports. In the proposed project, the jamming mitigation strategy leverages a ground detector to alert a UAS of an RFI—the UAS then takes off to find the offender. Precise localization is achieved through processing of power-measurement profiles over multiple UAS flybys. Since jamming is illegal, a WiFi LoRa transceiver is used as surrogate RFI in field testing.