Geometric Numerical Integrators for Engineering Applications
Various mechanical systems of interest in astrodynamics, fluid dynamics, plasma physics, and molecular dynamics often exhibit physically meaningful invariants such as momentum, energy, or vorticity. The behavior of these invariants in simulation provides an important measure of accuracy. Most traditional numerical methods do not account explicitly for these qualitative features of the underlying physical system, incurring error that may suggest nonphysical behavior.
The field of geometric numerical integration is concerned with numerical methods that respect the fundamental physics of a problem by preserving the geometric properties of the governing differential equations. The present research is working to develop and disseminate novel structure-preserving numerical methods for mechanical systems with time-dependence and external forcing, which are often found in engineering applications. The developed structure-preserving numerical methods will advance the capabilities of computational analysis tools that can improve our understanding and prediction of complex dynamical systems, and inform engineering design across a range of application domains.
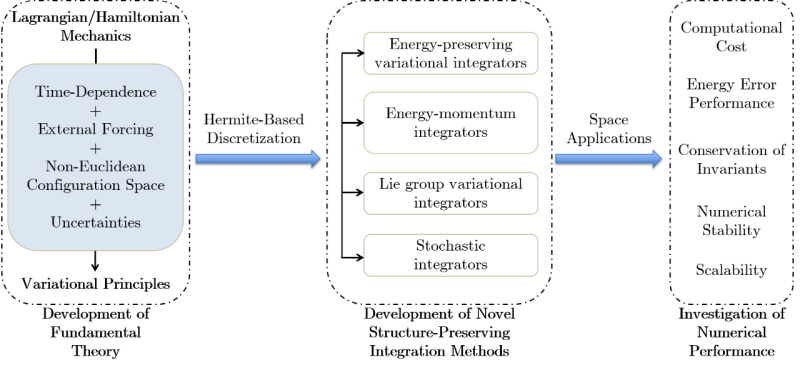
Past efforts in the field of geometric numerical integration have mainly focused on developing numerical algorithms for low-dimensional, time-invariant mechanical systems subject to conservative forcing. The present research effort is developing a theoretical framework to understand and extend the capabilities of existing geometric numerical methods with regard to explicit time-dependence, non-conservative forcing and constraints. Specifically, the research has developed structure-preserving methods for time-dependent mechanical systems with external forcing and extended these methods to systems that are constrained or that evolve on non-Euclidean manifolds.
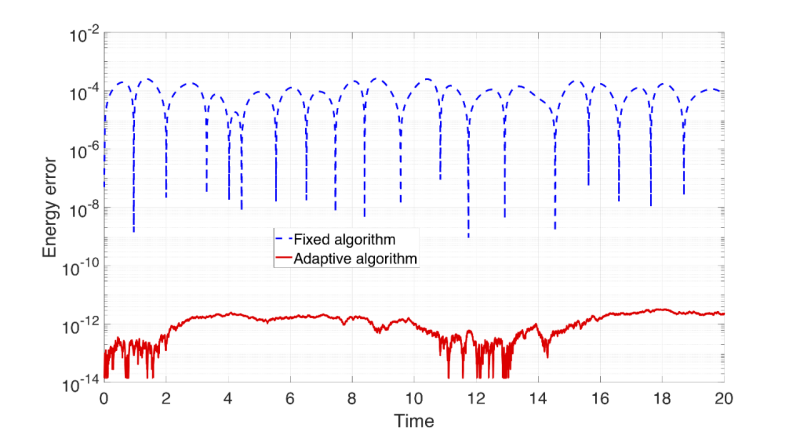
Given below are results from an adaptive time step Lie group variational integrator for the rigid body motion in SE(3). The numerical integrator is obtained from a discrete variational principle using extended Lagrangian mechanics where time variations are considered in addition to the configuration variable variations. The derived adaptive algorithm is symplectic, momentum-preserving, and conserves the system energy via time adaptation. In addition, due to the Lie group approach, the discrete trajectory preserves the Lie group geometry of the configuration space. We apply this method to a conservative underwater vehicle motion to illustrate the advantages of using adaptive time-stepping in Lie group variational integrators.
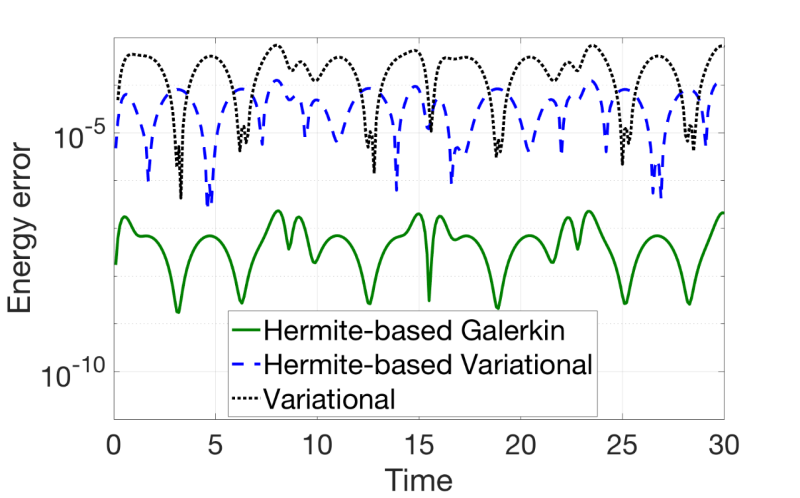
For fixed time step variational integrators, we are comparing typical first order variational integrators with variational integrators based on Hermite polynomial shape functions in time. These integrators lead to better energy preservation. We are also considering Hermite-polynomial based Petrov-Galerkin formulation. Preliminary results indicate that the Petrov-Galerkin based time integrators are providing significantly better energy preservation. Further investigation is being conducted to understand the mathematical basis for the better results from an integrator which is not inherently variational.