

Bio-Inspired Materials with Sensing and Actuation
Michael Philen, Harry Dorn, Don Leo, Lisa McNair (Virginia Polytechnic Institute and State University)George Lauder (Harvard University), James Tangorra (Drexel University)
This research project is a multi-university collaborative research effort in the design and development of biologically inspired material systems having distributed sensing, actuation, and intelligent control. The goals of this research project are to achieve a greater understanding of the hierarchical organization and structure of the sensory, muscular, and control systems of fish and to develop advanced biologically-inspired material systems having distributed sensing, actuation, and intelligent control.
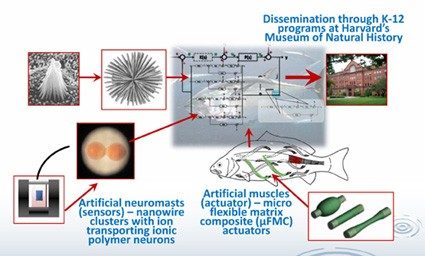
This research aims to identify and theoretically describe the computational processing performed at the local sensory level for muscle activation and vertebral-stiffness modulation along the tail structure of fish for locomotion. Through a series of interdisciplinary engineered experiments, the research seeks to understand (a) the ability of fish to actively modulate the mechanical properties of the tail via muscle recruitment, (b) how swimming gaits are regulated by a hierarchy of control systems that involve the visual, vestibular, and neuromast sensory systems, and (c) how hydrodynamic stimuli to the lateral line neuromasts directly influence the mechanical properties of the tail. An advanced multifunctional material system having distributed actuation and sensing will be developed to serve as a platform for validation and to provide greater understanding of the biology of these systems. The new material system will utilize innovative artificial neuromasts (sensors) and muscles (actuators) that are distributed and arranged as inspired by the configuration found in fish.
Through coupling of the biological and engineering experiments of the fish and artificial material system, the interdisciplinary team is working together to develop a new framework for observing, identifying, and predicting the sensorimotor behavior of fish for locomotion and stiffness modulation. This research is advancing the state-of-the-art development of multifunctional materials, leading to new structures that can intelligently sense and actuate a network of distributed robust sensors and actuators. Pioneer efforts include developing an advanced material system using nanotechnology and advanced composite technology, fabricating hierarchically structured sensors, creating new tools for bio-engineering investigations, and instigating a paradigm shift in the understanding of the organization and structure of the hierarchical control fish use for sensing and maneuvering.
Some example publications:
Borazjani, I., Sotiropoulos, F., Tytell, E. D., and G. V. Lauder. On the hydrodynamics of the bluegill sunfish c-start escape response: three-dimensional simulations and comparison with experimental data. Journal of Experimental Biology, in press, 2012.
Carlson, R. L. and G. V. Lauder. Escaping the flow: boundary layer use by the darter Etheostoma tetrazonum (Percidae) during benthic station-holding. Journal of Experimental Biology 214: 1181-1193, 2011.
Dorn, H.C., Fatouros, P.P., “Endohedral metallofullerenes: applications of a new class of carbonaceous nanomaterials,” Nanoscience and Nanotechnology Letters, 2(2), pp. 65-72, 2010.
Esposito, C. J., Tangorra, J. L., Flammang, B. E., and G. V. Lauder. A robotic fish caudal fin: effects of stiffness and motor program on locomotor performance. Journal of Experimental Biology 215: 56-67, 2011.
Flammang, B. E., Lauder, G. V., Troolin, D. R. and Strand, T., “Volumetric imaging of fish locomotion,” Biology Letters, doi:10.1098/rsbl.2011.0282, 2011.
Flammang, B. E., G. V. Lauder, D. R. Trollin, T. Strand, “Volumetric imaging of shark tail hydrodynamics reveals a three-dimensional dual-ring vortex wake structure,” Proc. Royal. Soc. London, doi:10.1098/rspb.2011.0489, 2011.
Fu, W., Azurmendi, H., Zhang, J., Dorn, H.C., “14N and 45Sc NMR Trimetallic Nitride Cluster (M3N)6+ Dynamics Inside an Icosahedral C80 Cage,” Chemical Communications, 47 (13), 3858-3860, 2011.
Huang, W., Zhang, J., Dorn, H.C., Geohegan, D., Zhang, C., “Assembly of Single Wall Carbon Nanohorn Supported Liposome Particles,” Bioconjugate Chemistry, ACS ASAP, 2011.
Lauder, G. V., P. G. A. Madden, J. L. Tangorra, E. Anderson, and T. V. Baker., “Bioinspiration from fish for smart material design and function,” Smart Materials and Structures, in press, 2011.
Lauder, G. V. Swimming hydrodynamics: ten questions and the technical approaches needed to resolve them. Experiments in Fluids 51: 23-35, 2011.
Lauder G. V., Lim, J., Shelton, R., Witt, C., Anderson, E. J., and Tangorra, J. Robotic models for studying undulatory locomotion in fishes. Marine Technology Society Journal 45: 41-55, 2011.
Oeffner, J. and G. V. Lauder. Hydrodynamic function of shark skin and two biomimetic applications. Journal of Experimental Biology, 2012, in press.
Philen, M. “Plant-Inspired Flexible Matrix Composite Actuators for Biomimetic Underwater Propulsion Systems,” Book: Plants and Mechanical Motion— A Synthetic Approach to Nastic Materials and Structures, 2011, in press.
Sarles, S.A., Madden, J.D.W, and Leo, D.J., “Hair cell inspired mechanotransduction with a gel-supported, artificial lipid membrane,” Soft Matter, vol. 7, pp. 4644-4653, 2011.
Sarles, S.A., Stiltner, L.J., Williams, C. B., and Leo, D.J., 2010, “Bilayer formation between lipid-encased hydrogels contained in solid substrates,” Applied Materials and Interfaces, vol. 2, no. 12, pp. 3654-3663.
Sarles, S. A.; Leo, D. J., Embedded Interface Bilayers for Durable Biomolecular Materials, ASME SMASIS 2010 Conference, Philadelphia, PA, September 28-October 1, 2010, accepted.
Sarles, S. A.; Williams, C. B.; Leo, D. J., Bilayer formation between lipid-encased hydrogels contained in solid substrates. ACS Applied Materials & Interfaces 2010, (submitted for review).
Sarles, S. A.; Leo, D. J., Encapsulated Interface Bilayers for Durable Biomolecular Materials. ASME Conference Proceedings 2010, 2010 (accepted).
Tangorra, J.L., Gericke, T., Lauder, G.V., Learning from ray-finned fins for propulsors for unmanned undersea vehicles, Marine Technology Society Journal, 2011 (invited), in press.
Tytell, E. D., Borazjani, I., Sotiropoulos, F., Baker, T. V., Anderson, E. J., and Lauder, G. V., “Disentangling the functional roles of morphology and motion in fish swimming,” Integrative and Comparative Biology 50: 1140-1154, 2010.
Zhang, Jianfei; et. al, Dorn, Harry C.. “In Vitro and In Vivo Studies of Single-Walled Carbon Nanohorns with Encapsulated Metallofullerenes and Exohedrally Functionalized Quantum Dots”. NanoLetters.
Zhang, Z., Philen, M., Neu, W., "Development of a Bio-Inspired Artificial Fish using Flexible Matrix Composite Actuators," Journal of Smart Materials and Structures, 2010.
Zhang, Z.; Philen, M., Modeling and Analysis of FMC Actuators for Bio-Inspired Actuation, ASME SMASIS 2010 Conference, Philadelphia, PA, September 28-October 1, 2010.
Zhang, Z., Philen, M., Neu, W., "A biologically inspired artificial fish using flexible matrix composite actuators: analysis and experiment," Smart Materials and Structures, Vol. 19, No. 9, pp. 1-11, 2010.
Zhang, Z., Philen, M., "Review: Pressurized Artificial Muscles," Journal of Intelligent Material Systems and Structures, 2011, in press.
Zhang, Z., Philen, M., “Modeling, analysis, and experiments of inter-fiber-yarn compaction effects in flexible matrix composites," Composites Science and Technology, in revision, 2012.